Modules¶
core¶
- fhb Action_lib framework
- Project library
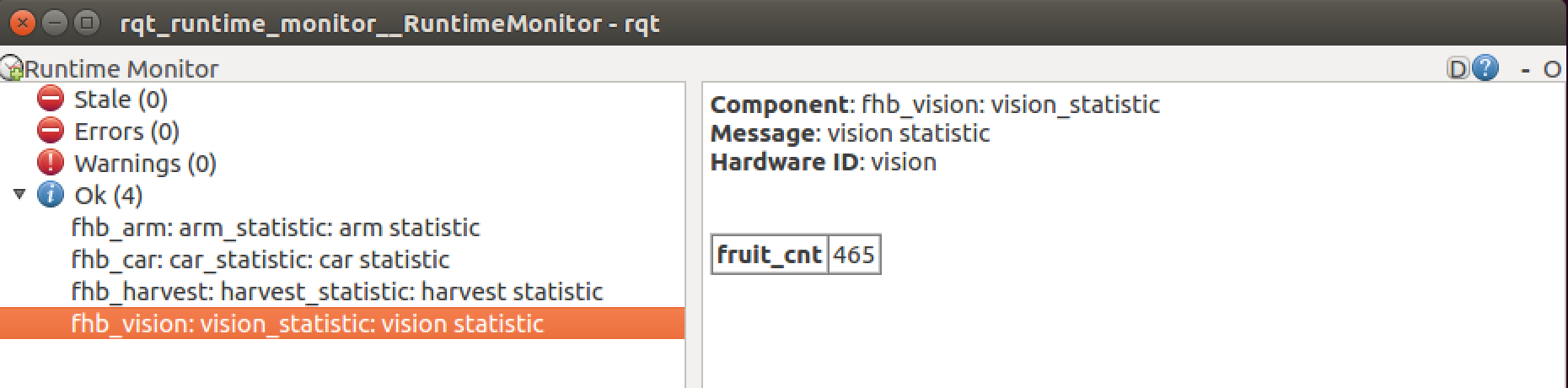
- Report framework
basic¶
roslaunch ./10-basic/cli/launch/cli.launch
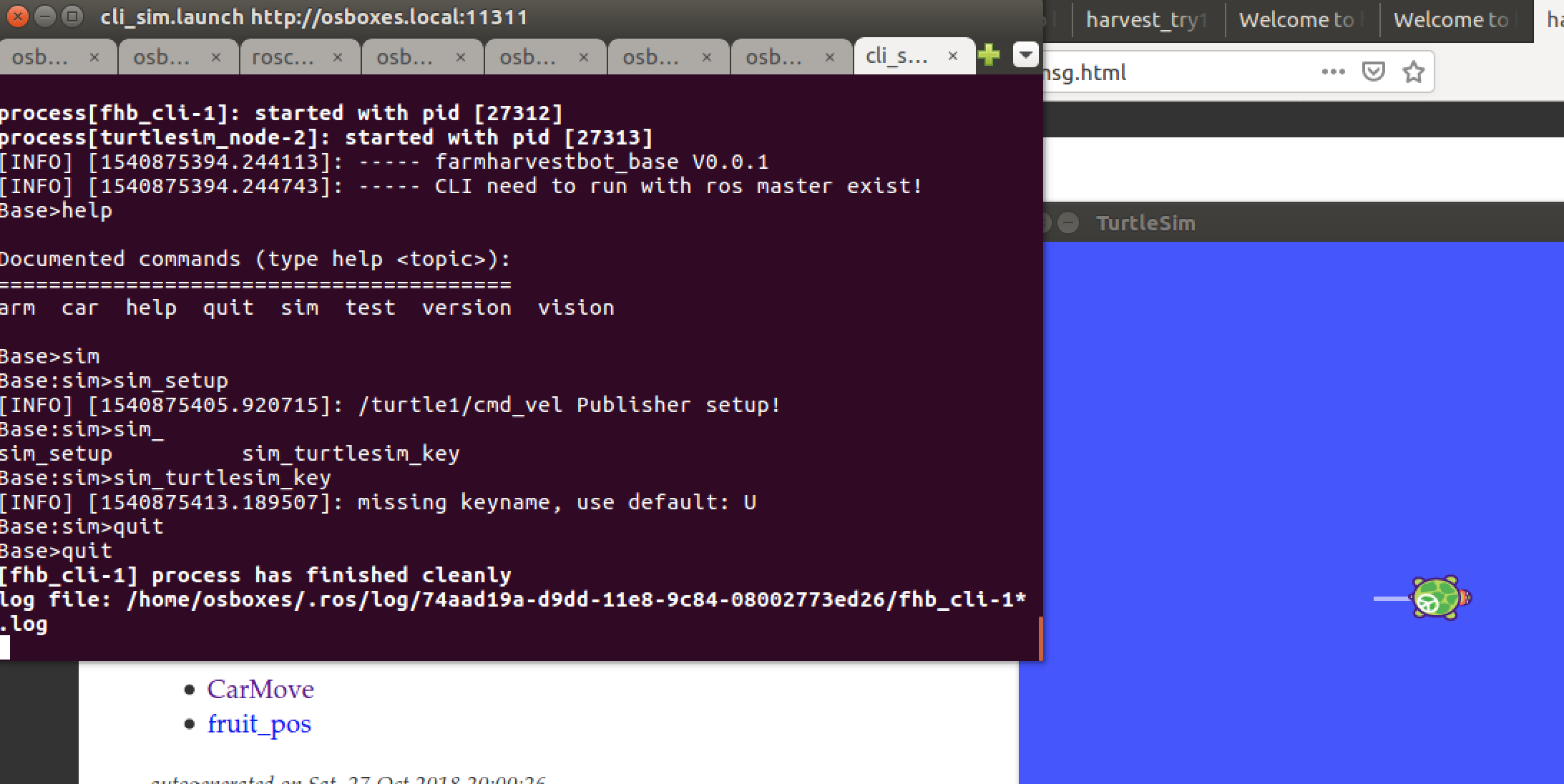
roslaunch ./10-basic/cli/launch/cli_sim.launch
roslaunch ./10-basic/cli/launch/fsm.launch
roslaunch ./10-basic/cli/launch/sim.launch
- CLI
- NodeJS ROS Test
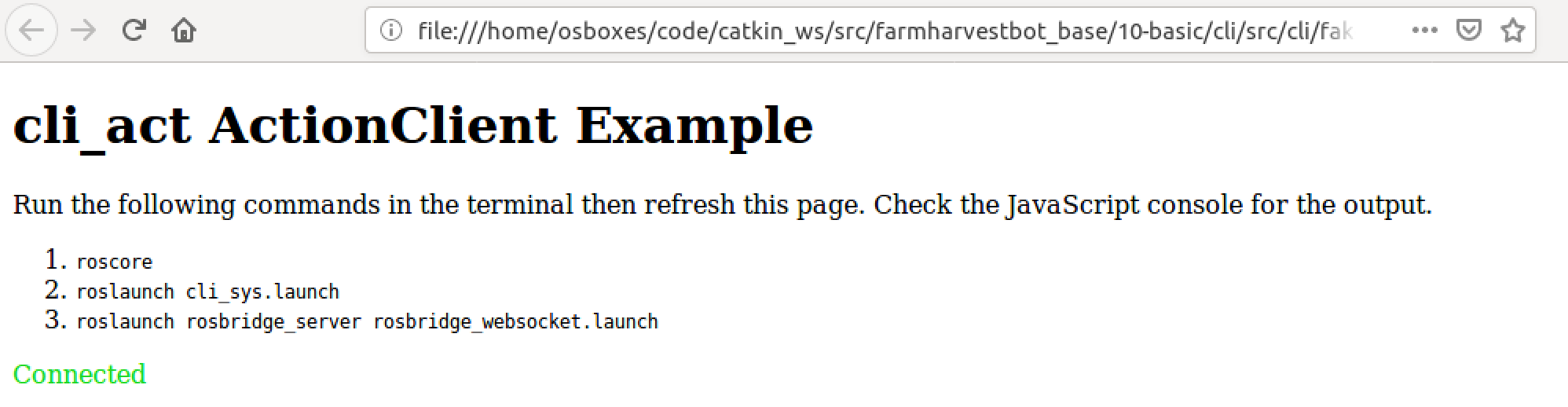
- ActionLib for Web
msgs¶
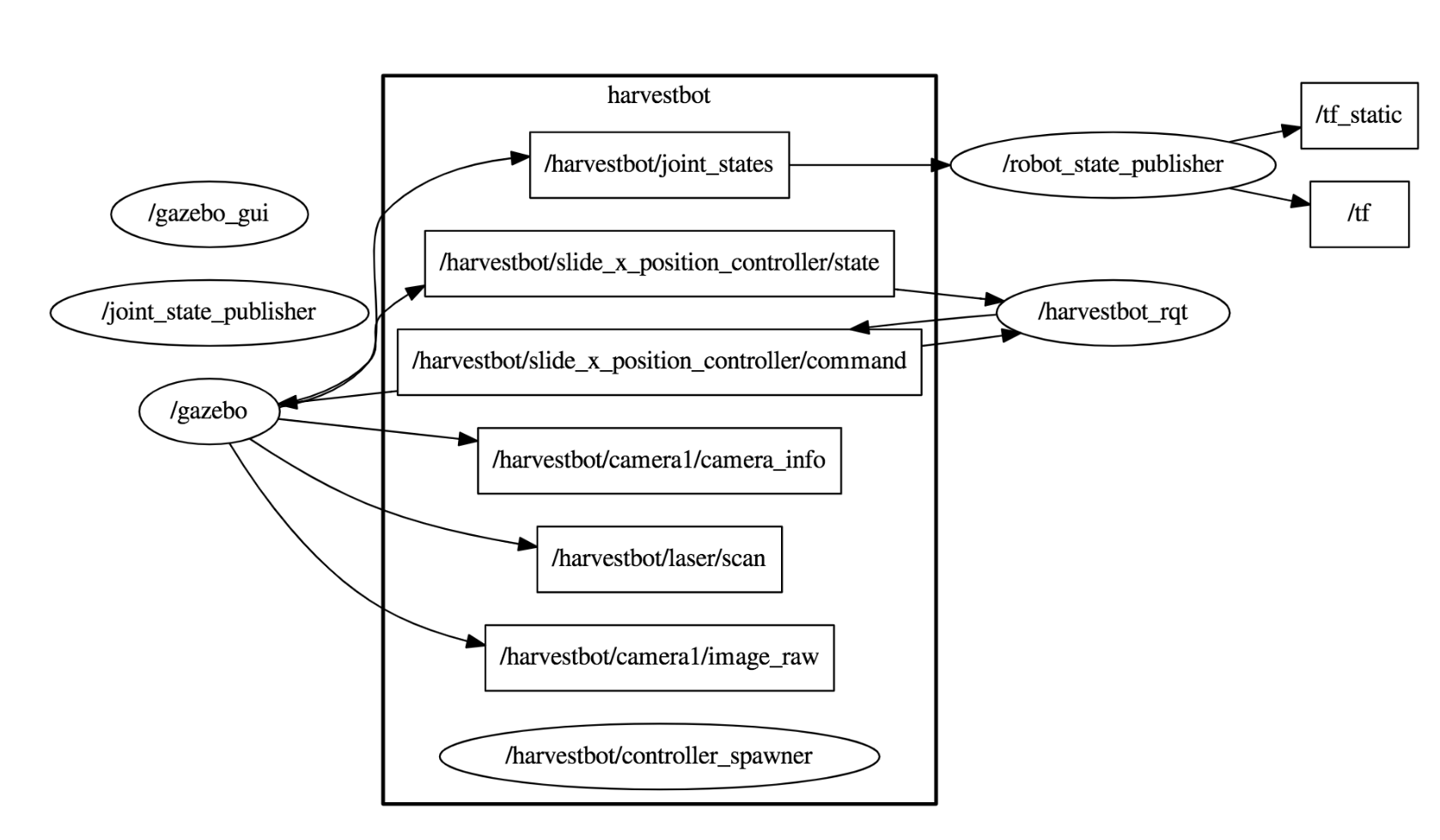
Harvestbot_model¶
- Installation
- Usage
以rviz觀看harvestbot:
roslaunch harvestbot_description harvestbot_rviz.launch
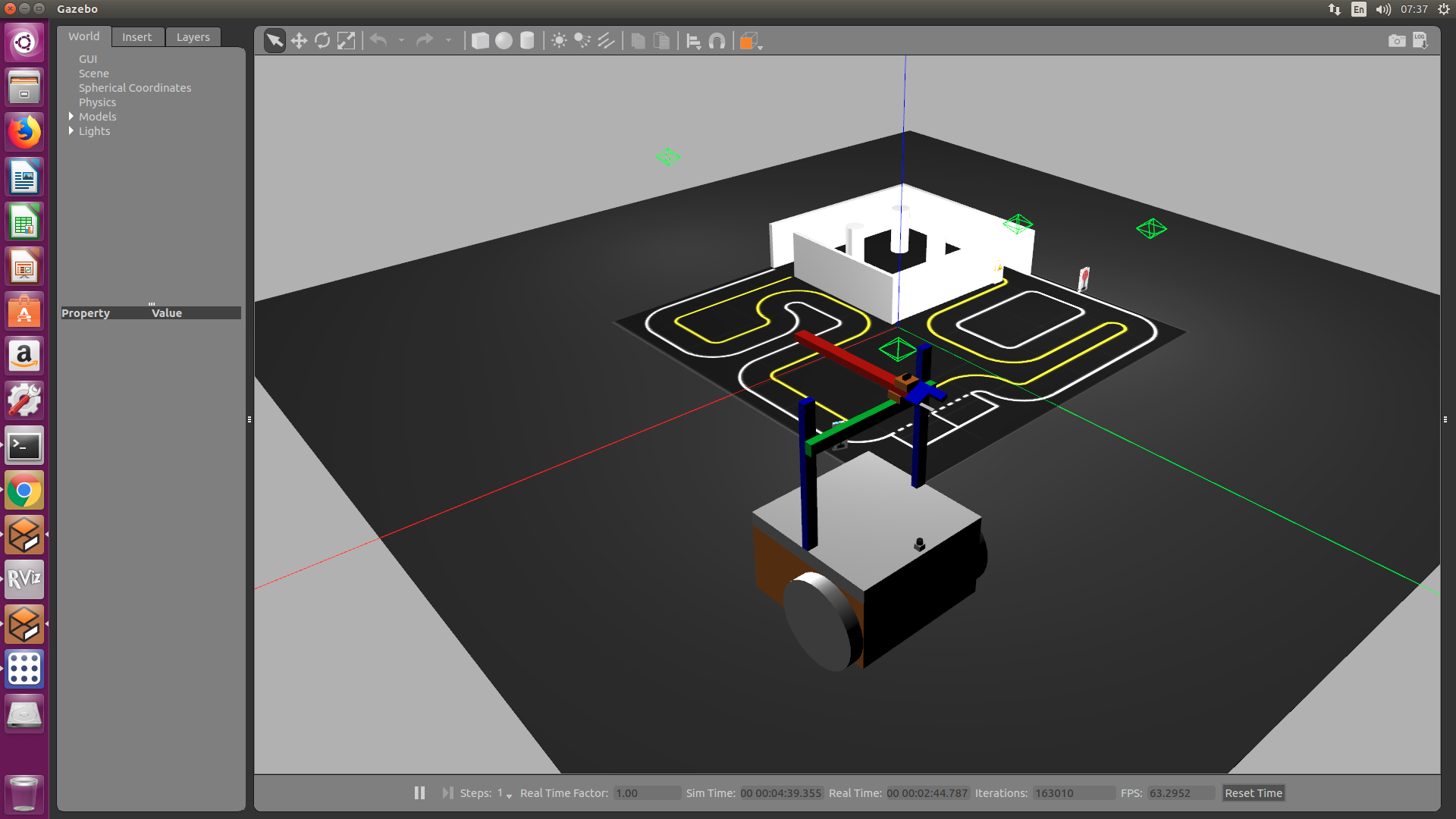
在gazebo模擬時可看到camera跟laser scan訊號
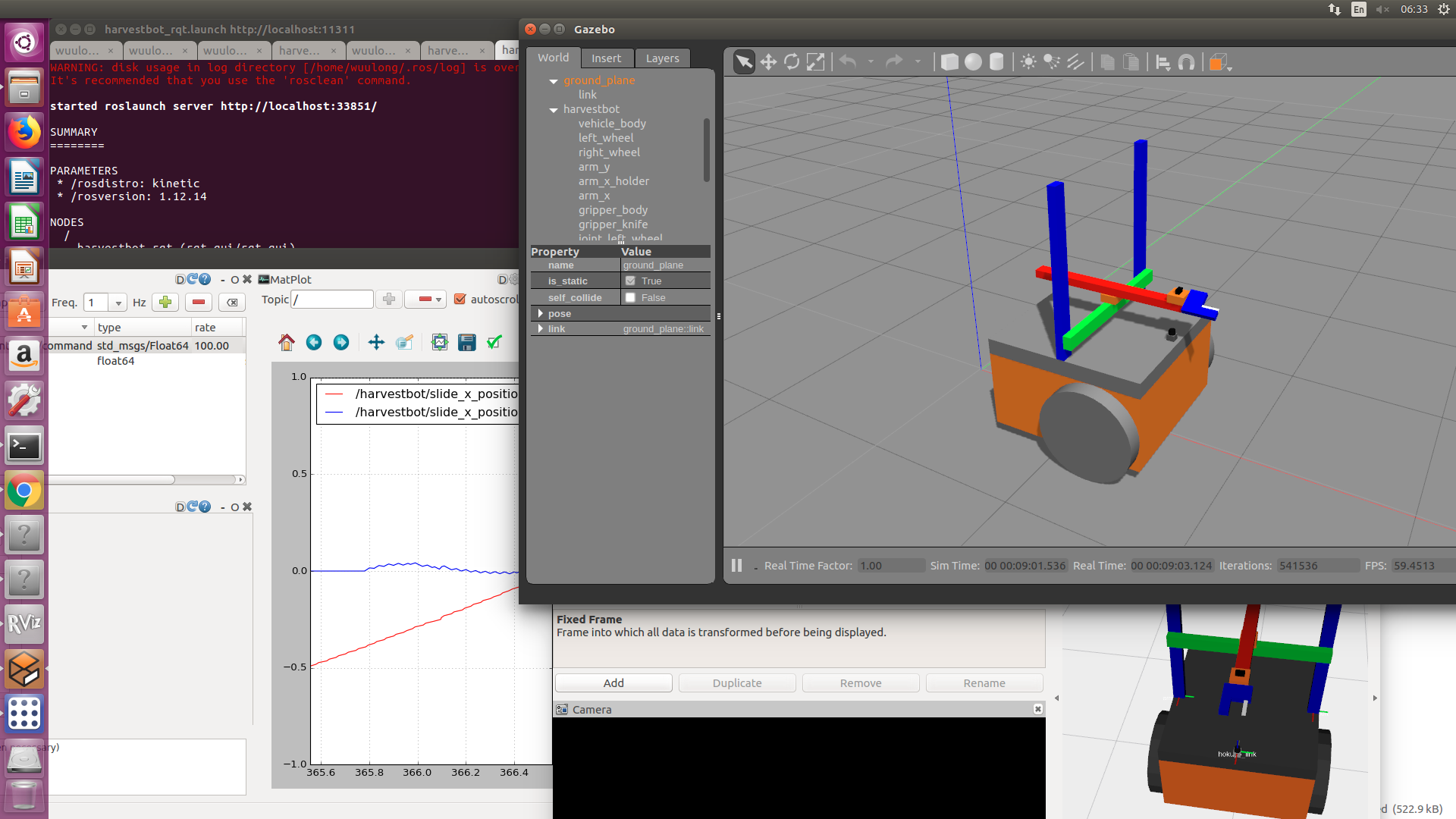
以gazebo模擬harvestbot:
roslaunch harvestbot_gazebo harvestbot_world.launch
在gazebo模擬時可打開rqt發送topic控制harvestbot:
roslaunch harvestbot_control harvestbot_rqt.launch
harvest¶
roslaunch ./30-harvest/launch/harvest_analyzer.launch
roslaunch ./30-harvest/launch/harvest_sys.launch
- fsm
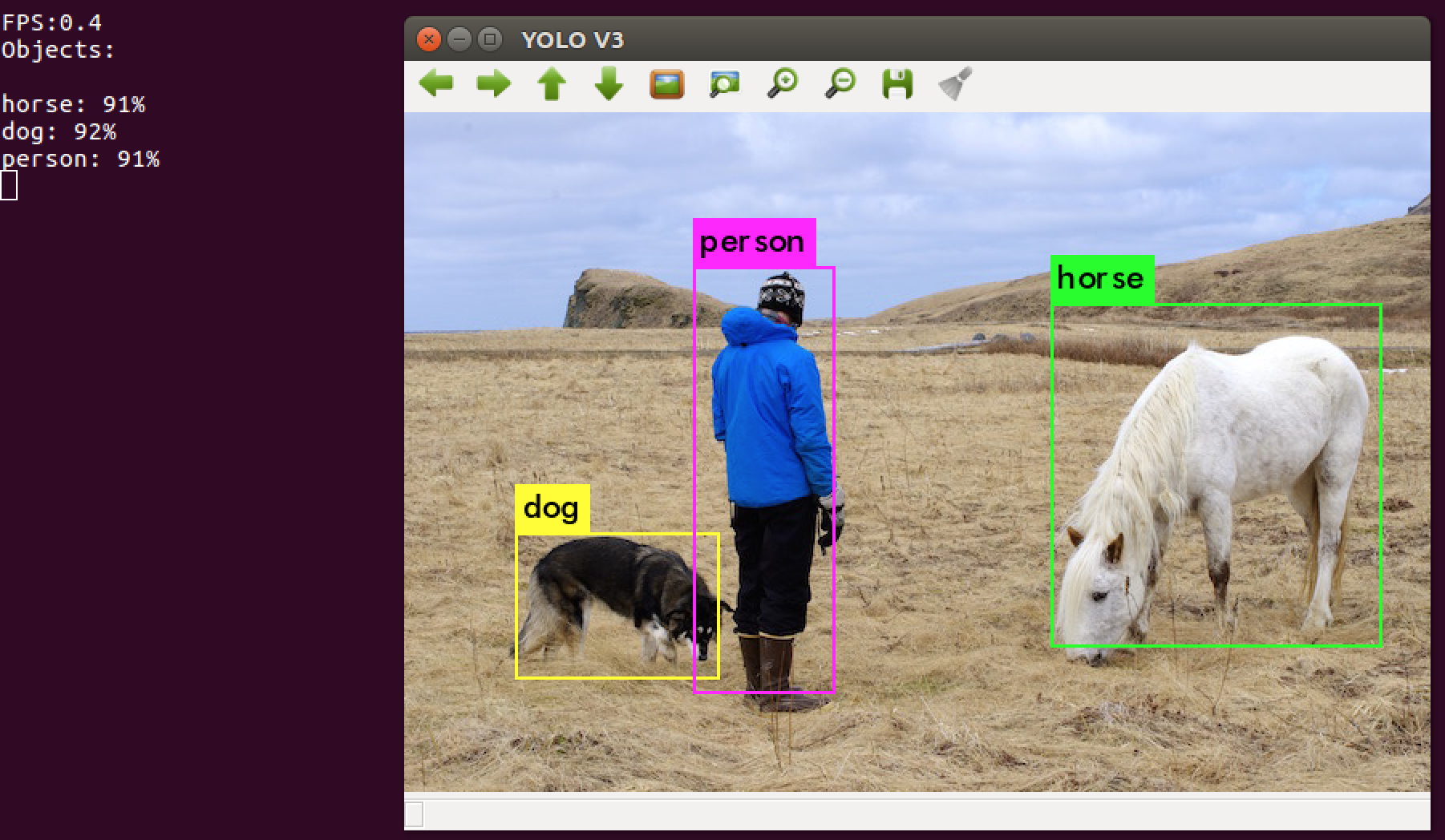
vision¶
roslaunch ./40-vision/launch/vision_sys.launch
roslaunch ./40-vision/launch/vision_test.launch
- ROS with RPI camera
- ROS+RPI camera+python opencv
- ROS + YOLO
- Publishing an image from disk

car¶
roslaunch ./60-car/launch/car_sys.launch